
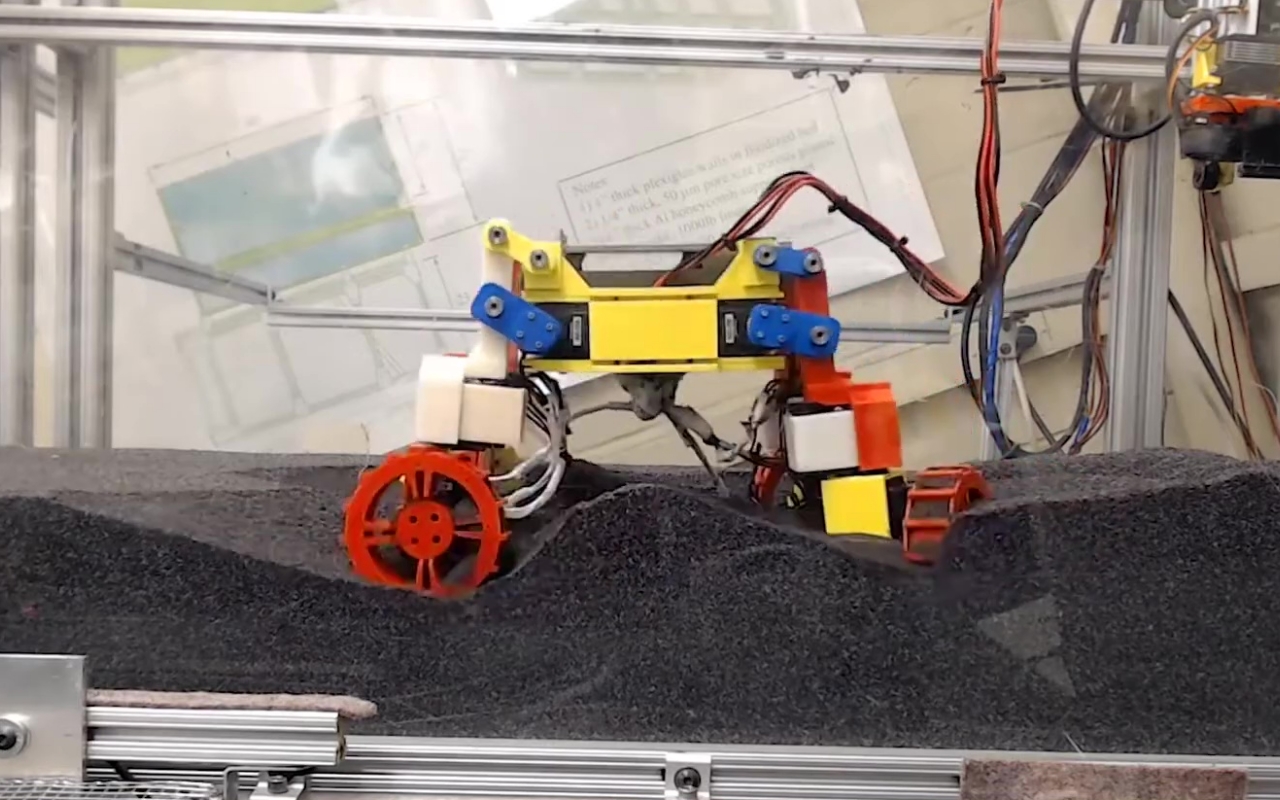
多くの人は、月や火星、さらには小惑星さえも着陸して走る新しいローバーをはっきりとは理解していないかもしれません。これらのローバーは見た事のない地形をほとんど自分でナビゲートする必要があり、このミニローバーのプロトタイプが示すように、人間の支援なしに砂のトラップを回避する必要があります。
月と火星のなじみのない岩だらけの表面をナビゲートしてドライブするのはとても困難であり、緩やかな物質と細かい表面の丘をナビゲートしてドライブするのはさらに困難です。砂漠の砂の上を運転している人なら誰でもわかるように、特別なホイールとそのためには多くの力が必要になります。ローバーが光年を離れて利用することはできません。
そのため、ジョージア工科大学とNASAのジョンソンスペースセンターの研究者たちは、高価な部品や特別な部品を使用する必要はなく、ロボット工学や力学を使用してローバーを困難な場所から取り出す一般的な部品を使用するソリューションに取り組んできました。彼らの解決策は「リアローテーターペダリング」と呼ばれ、ローバーが車輪を揺らしているように見えます。
靴の底から音を出すために足を持ち上げて揺らすほど簡単ではありませんが、その一部を真似てあります。実際に行うことは、前輪から後輪まで砂質を「雪崩」し、後輪がより簡単に乗り越えることができる一種の丘を作り出します。これを十分な回数以上繰り返すと、車両は最終的に目的地に到達します。

もちろん、このミニローバーは車輪付きのフルサイズのロボットではないため、ミニローバーと名付けられました。次に、ロボットをスケールアップして、同じテラダイナミクスがより大きなローバーで機能するかどうかを確認します。同じ移動原理が最終的にはここでテラファーマのでこぼこで不安定な地形をナビゲートしなければならないロボットに適用させるため、彼らはその適用をエキゾチックな地球外の場所に限定していません。